连接到精确、高效的装配体分析连载(一)销钉接头
本白皮书仅适用于由通过螺栓、螺钉、销钉或弹簧连接的多个零件构成的装配体组成的产品。不同类型的装配体有着不同的模拟难点。但它们相同的一点是,都需要模拟连接装配体零部件的接头,这种模拟通常需要广泛的分析知识和大量时间。
专业的分析人员发现,尽管他们有专业的知识和经验,进行装配体分析仍然非常困难,并且需要消耗大量时间。例如,要模拟销钉连接(也就是一对圆筒由销钉连接配合到一起,销钉允许或限定零件之间的旋转,例如钳子可能用到的连接),专业的分析人员通常必须对穿过铰链圆筒的销钉进行建模,并定义销钉和圆柱表面之间的缝隙接触,然后才能开始真正的分析。分析人员还需要知道使用多大的销钉。
设计工程师日常工作中最重要的部分是产品设计,而不是模拟;他们不是专业分析人员。他们非常忙,没有时间以传统的方式模拟接头。
但是如果他们不必以传统方式进行模拟,如果他们使用的软件有足够的智能为他们完成其中最困难的部分,这该有多好?
这正是COSMOSWorks和COSMOSDesignSTAR所能做的。这两个程序中包含虚拟的接头,使得分析包含销钉、弹簧、螺栓和螺钉的装配体变得非常轻松和快速。
这些虚拟接头背后的概念与几代专业分析人员一直使用的概念完全相同。
COSMOS在精确度上没有任何折扣。
它提供简洁的用户界面,采用直接简单的输入,将许多以前由分析人员执行的任务放到软件中执行,从而提供全面、精确的结果。
销钉接头
便携式计算机、剪刀式升降机、钳子以及致动器之类的产品的铰链一般都会使用销钉接头。
每个人都非常熟悉的一个实例就是钳子(图1)。销钉穿过钳子的两个柄,活动钳柄即可打开或合上钳口。在传统的有限元分析(FEA)中,模拟销钉行为的典型方法是在有限元网格中对销钉零件进行建模,然后由分析人员定义销钉和钳柄的圆柱面之间的接触。
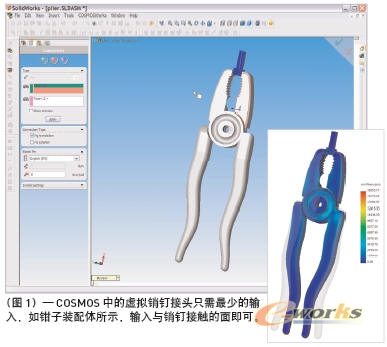
(图1)—COSMOS中的虚拟销钉接头只需最少的输入,如钳子装配体所示,输入与销钉接触的面即可。
但是,如果设计模型中包含多个销钉(例如剪刀式升降机),使用接触定义销钉行为将消耗大量资源,有时候求解起来不太现实。此外,这种做法可能无法提供最需要的信息。
在多数情况下,用户需要知道销钉对其相邻零件或整个装配体的影响,而不是销钉本身上的应力分布。COSMOS中的虚拟销钉接头专门用于处理这种情况,从而使分析变得更加快速轻松。利用这一功能,用户就可以了解销钉上的力和运动并据此确定销钉的大小。
定义虚拟销钉连接非常简单。例如钳子,用户只需先确定与销钉接触的面即可。COSMOS中的虚拟销钉接头可以用来模拟旋转、前后滑动或者既旋转又滑动的销钉(图2)。因此,设计工程师需要选择所需的运动。很明显,对于钳子,用户会假定所选面绕销钉自由旋转。
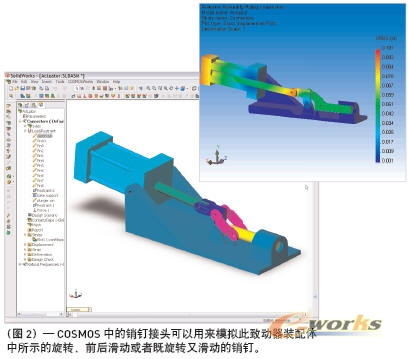
(图2)—COSMOS中的销钉接头可以用来模拟此致动器装配体中所示的旋转、前后滑动或者既旋转又滑动的销钉。
尽管界面非常简单易用,但软件会执行定义销钉的FEA模拟所需的任务,这些任务与传统分析中所述的任务同样复杂。COSMOS使用横梁单元对销钉进行建模,并使用由用户指定了轴和旋转刚度的杆单元将其连接到两个零件的圆柱面(图3)。面的相对轴向运动取决于在接合处产生的轴向力及指定的轴向刚度。
同样,相对旋转取决于在接合处产生的力矩及指定的旋转刚度。如果用户需要对自由旋转的纯粹销钉连接建模,可以选择“无平移”选项,COSMOS会自动定义轴向刚度,使该连接在允许自由旋转的同时没有平移。
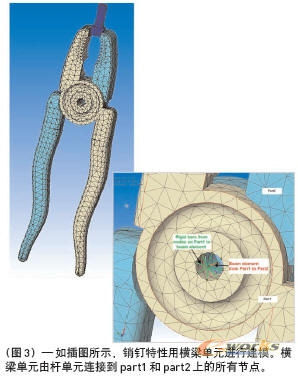
(图3)—如插图所示,销钉特性用横梁单元进行建模。横梁单元由杆单元连接到part1和part2上的所有节点。
除简化销钉建模之外,COSMOS中的虚拟销钉接头还使分析软件的新手用户能够轻松处理与销钉连接的装配体。与以前的分析人员不同,他们不必担心横梁单元的位置,也不必担心杆单元用来限制旋转或平移的刚度。
如果用户要自行对虚拟销钉接头进行建模(如果使用COSMOS之外的其他软件,这是其唯一选择),即必须手动定义横梁单元和杆单元。在钳子的示例中,设计工程师需要创建一个横梁单元和160个杆单元。因此,如果设计需要更改,并导致大量重复的几何体更改或网格更改,用户每次都必须重复这些步骤。而且,如果设计工程师在定义横梁单元或杆单元时出错,他将很难找到何处出错。