Ansys Speos|杂散光分析 – 智能手机摄像头
附件下载
联系工作人员获取附件
简介
本示例的目标是研究智能手机摄像头系统的杂散光。杂散光是指非预期的光源在光学系统中到达传感器的能力。这些传感器可以是电子传感器(如CMOS图像传感器),也可以是人眼。非预期光源的光线到达传感器会降低光学系统的性能,因此在系统设计中必须予以考虑。
为了能够完成本示例,您的计算机需要安装以下工具:
- Ansys Zemax OpticStudio 2024 R1(用于导出 .odx 文件,此步骤为可选)
- Ansys Speos 2024 R1
本示例的目标是分析智能手机摄像头系统的杂散光。杂散光指的是到达接收端的非预期光线。这个接收端可以是图像传感器(如CMOS),也可以是人眼。这些非预期的光线会降低光学系统的成像质量,因此在系统设计阶段就必须加以控制。
概述
对光学系统进行杂散光分析及像质评估,需要考虑镜头几何形状以及约束这些镜头的光机结构件。
杂散光可能来源于以下几种情况:
- 镜面反射:例如光滑光学表面产生的菲涅尔反射,或者从视场外进入系统的光线。
- 光学散射:即光线在粗糙光学表面发生散射,或由于光学材料内部的体积不均匀性而产生的散射。
- 孔径边缘衍射。
- 系统中的光机结构件:例如光线在光机结构件表面发生的反射或散射。
杂散光分析的核心在于识别光学系统中各种杂散光的来源,并尽可能减小(或理想情况下完全消除)它们的影响。仿真是进行可靠杂散光分析的关键手段。Ansys Optics 提供两款软件工具,支持从端到端的全方位杂散光分析流程,用于设计高精度光学系统:
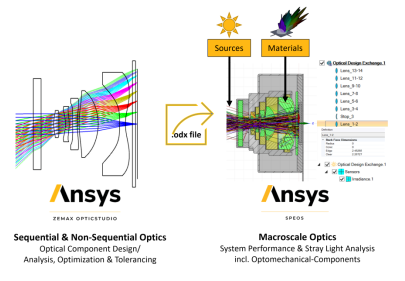
- Ansys Zemax OpticStudio
- Ansys Speos
鬼像分析通常在镜头未装配的设计阶段,在 OpticStudio 中进行。OpticStudio 是设计光学元件及子系统的首选工具,用于减小光滑光学表面菲涅尔反射带来的影响,可以优化鬼像焦点的位置,判断哪些表面最适合镀增透膜等。
借助光学设计交换格式(.odx),杂散光分析流程可以无缝衔接至 Speos 中继续完成。该格式实现了 OpticStudio 与 Speos 之间的数据无缝传递。
Speos 不依赖特定 CAD 平台,其直接建模工具使工程师除了优化好的镜片组外,还能同时考虑光机结构件的影响。它提供了直接建模功能,可以快速进行 CAD 模型修复、设计创建和修改、参数化设计及材料优化。Speos 能够精确模拟光在光学产品(如手机摄像头)模型中的传播行为。结合其高级杂散光分析能力——包括支持 Light Expert (LXP) 技术、序列检测、光线路径筛选、多传感器分析、3D 照度分析以及自动化功能等,Speos 为高精度光学系统的设计与杂散光分析提供了端到端的完整解决方案。
最终,完整的摄像头系统可以放置于逼真的虚拟环境中进行性能分析和最终验证。
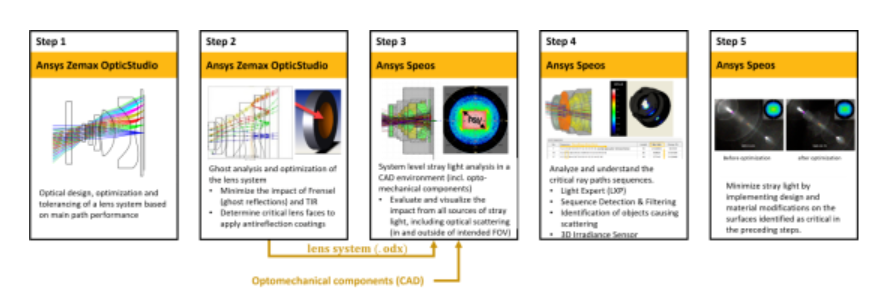
借助Ansys Optics工具分析摄像头系统杂散光的联合仿真流程如下:
1.光学设计与优化
根据主光路成像性能(如调制传递函数MTF、点扩散函数PSF),对镜头系统进行设计、优化及公差分析。
2.鬼像优化与分析
重点在于减小菲涅尔反射带来的影响,并确定需要镀增透膜的关键镜片面。
3.系统级杂散光分析与可视化
- 使用“光学设计交换格式”(.odx)将光学系统从Zemax转移至Speos,同时将镜筒、安装结构、外壳等光机元件纳入考量,进行系统级的杂散光分析。
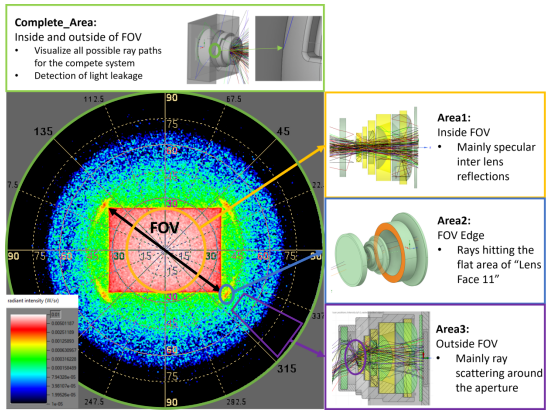
- 检测关键光源位置:识别出视场内外的所有潜在关键光源位置,并评估整个系统的漏光情况。
4.分析杂散光路径并应用序列过滤
找出导致杂散光的最关键元件,特别关注光机结构件产生的散射。
5.杂散光抑制
根据前面步骤中识别出的关键表面,通过修改设计及材料来抑制系统中的杂散光。
通常情况下,上述流程的第1、2步在 Ansys Zemax OpticStudio 中完成,本文不再赘述。本示例将重点介绍流程中与 Speos 相关的部分,包括光学设计交换功能、杂散光分析概念,以及 Light Expert、序列检测和 3D 辐照度传感器等 Speos 特性的应用。
第3a步:使用光学设计交换功能将 ZOS 镜头设计转移至 Speos
本步骤中,利用光学设计交换(.odx)文件格式,将镜头设计从 Ansys Zemax OpticStudio 导入至 Ansys Speos,实现了无缝互操作,从而确保杂散光分析流程高效顺畅。通过使用 .odx 格式,序列和非序列组件均可导出,但需要注意的是,包含 Zemax 黑盒(Black Box)的组件无法导出。
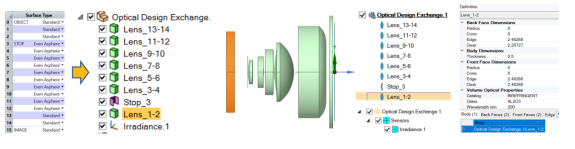
本示例采用了一套精简高效的镜头系统,该系统已在 Ansys Zemax OpticStudio 的序列模式下完成像差设计与优化。
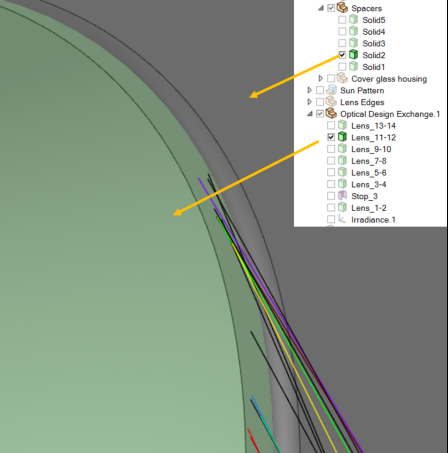
.odx 文件作为一个容器,存储了镜头设计、光谱材料与镀膜属性、光阑面以及传感器等信息。有关文件内容、支持的面型和对象类型的更多信息,请参阅相关链接。镜头系统(绿色)将被添加到已在 Speos 中预定义好的光机结构件(灰色)及镜片边缘(黄色)之上。
第3b步:检测视场内外所有可能的关键光源位置,以及整个系统的漏光情况。分析杂散光路径序列,并识别出导致杂散光的最关键元件。
本步骤采用逆向光线追迹,通过单次仿真即可识别所有潜在的关键光源位置。该方法的原理是从图像传感器出发,将光线反向追迹至场景,穿过整个摄像头系统,同时还能识别机械结构中的漏光。Speos 的蒙特卡罗光线追迹算法会综合考虑所有几何体的材料特性。此外,还将根据光源的关键程度以及光线路径位于摄像头视场内部还是外部,对这些区域进行分类。
在摄像头视场范围内,多数光源会在光学镜片的抛光表面发生多次反射,从而在图像传感器上形成鬼像与镜头眩光。而视场外的光源则可能在机械和光学部件上引发杂散光散射。为此,本文将介绍一种方法,用于识别并分析本系统中特定类型杂散光的根本成因。
借助 Speos 的 Light Expert (LXP) 与序列检测功能,可以针对强度结果中的特定区域,可视化并导出相应的光线路径。
第4步:分析杂散光路径序列,并针对视场内的某个特定光源位置,识别出引发杂散光的最关键物体。
第4步中,将根据射入传感器的辐照度大小,识别并研究最关键的光线路径序列,找出在20°光源位置下导致图像传感器上产生杂散光的物体交互作用。该分析利用 Speos 的 LXP 功能和“序列检测”功能。此外,还将借助镜筒上的 3D 辐照度传感器,识别出辐照度较高的区域。
第5步:根据以上步骤中识别出的关键表面,通过修改设计和材料,抑制系统中的杂散光。
第5步中,针对第3b步和第4步所识别出的最关键几何面,通过镀膜来抑制杂散光。具体措施包括:镀制增透膜与高吸收膜,同时对光机结构件进行设计修改,以降低噪声并提升整个光学系统的性能。
运行与结果
以下步骤将引导您完成利用Speos功能分析智能手机摄像头系统杂散光的完整流程:
第3a步:使用“光学设计交换”功能将光学系统从Zemax转移至Speos
首先,在ZOS中为手机镜头设计生成.odx文件(可选)。然后,将镜头系统导入至已在Speos中预定义好的光机结构件及镜片边缘中。最后,为后续步骤准备仿真。
注意事项:
如果无法使用Ansys Zemax OpticStudio,可以跳过.odx文件的生成,直接进入第3步。要在Speos中启用.odx导入功能,需要在Speos选项的“高级”部分开启“Beta功能”。操作路径:打开Speos → 选项(Options)→ 高级(Advanced)→ 勾选“启用Beta功能”(Enable Beta features)。
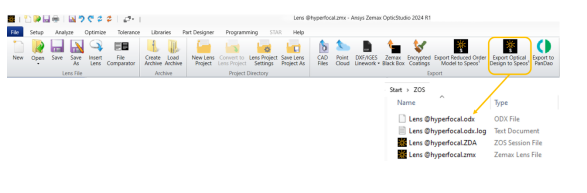
1.启动 Ansys Zemax OpticStudio 2024 R1,打开 “Lens @hyperfocal.zmx” 项目文件(位于 “\ZOS\” 文件夹内)。
2.“将光学设计导出至 Speos” 功能的按钮位于“文件”选项卡下的“导出”组中。生成的 .odx 文件将保存在项目文件夹内。
3.启动 Ansys Speos 2024 R1,打开 “Stray Light Analysis - Smartphone Camera.scdocx” 项目文件(位于 “\Speos\” 文件夹内)。该项目包含多个预定义的传感器,以加快仿真设置速度。其中包括一个覆盖摄像头前半球的强度传感器,以及一个代表图像传感器的辐照度传感器。这两个传感器均设置为 “Sequence” 层,这是为了在仿真结果中分离光线路径序列所必需的。
4.点击 “Light Simulation” 功能区下 “Components” 组中的 “Optical Design Exchange” 按钮。

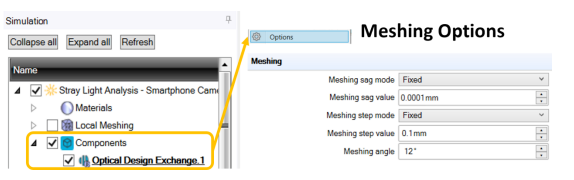
5.在“仿真”面板中,将新建一个名为“Optical Design Exchange Component.1”的组。
6.可通过右键点击 ODX 并在弹出的选项中进行网格参数的设置。网格质量会影响仿真的性能以及结果的准确性。对于光学成像系统,建议设置以下网格参数值。有关网格划分的更多信息,请参见“重要 Speos 模型设置”一节。
注意:可以将 ODX 组件的网格设置导出为 Speos 的“预设”并设为默认值,以便在后续项目中节省时间。
7.进入定义面板,保持“轴系参考”为默认设置(图像面位于全局坐标参考系下),然后浏览并选择“Lens @hyperfocal.odx”文件。
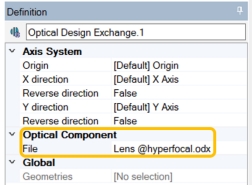
8.点击Compute启动导入。在计算过程中,几何体和传感器将在某个组件内被创建。几何体名称会指明对象类型(镜片或光阑)及其在 OpticStudio 中的对应索引。出于验证目的,每个对象的参数及关联几何体(实体或表面)均为“只读”状态。默认尺寸单位为毫米,波长单位为纳米。半径参数通过设置为零来表示无穷大。
9.下一步,可以将该 ODX 添加到两个预定义的仿真中。
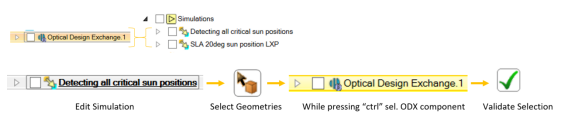
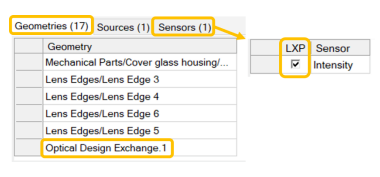
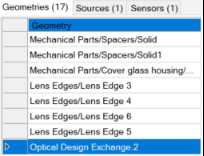
10.请验证所有 17 个几何体(包括 Optical Design Exchange.1)均已添加到仿真中,并检查两个仿真中的所有传感器均已激活 LXP。
11.现在保存项目,并在 CPU 上运行以下仿真:
- 检测所有关键光源位置– 20 核下约 10 分钟
- 20° 光源位置的 SLA 杂散光分析(含 LXP) – 20 核下约 30 分钟
注意:
杂散光分析仿真对计算资源要求较高,因为需要追迹大量光线。结果的质量取决于可用的硬件配置。
若要继续后续步骤,可以从下载文件夹中提供的快捷方式“Stray_Light_Analysis_Simulation_Results”下载带有预计算 results 的项目。然后打开“Stray Light Analysis - Smartphone Camera.scdocx”项目(位于“\Speos\”文件夹内)。
第3b步:检测整个系统中所有可能的关键光源位置及漏光情况
在杂散光分析的第二步中,将识别摄像头视场内外所有可能的关键光源位置。本示例中,在系统前方放置一个180°强度传感器,以覆盖半球范围内的任何关键光源位置。执行非序列蒙特卡罗仿真:光线从光源随机发射并在光学场景中传播。任何与传感器平面相交的光线均被纳入考虑。每条光线路径随后被归为某个序列,即几何体或表面上按顺序发生的一系列交互。所有序列按照到达传感器的能量大小进行排序。
在结果中,这些序列以“层”(Layers)的形式分开存储,便于独立分析。仿真结果将揭示因光机结构件或外壳设计不当而引起的任何潜在漏光。利用 Speos Light Expert (LXP) 可对这些关键光线路径及其在系统中的交互过程进行可视化。本步骤将介绍一种工作流程,借助 Speos 的 LXP 和“序列检测”功能,分析导致非预期杂散光的光线路径序列及物体交互。
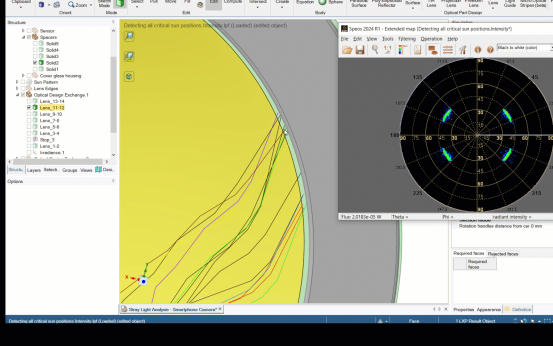
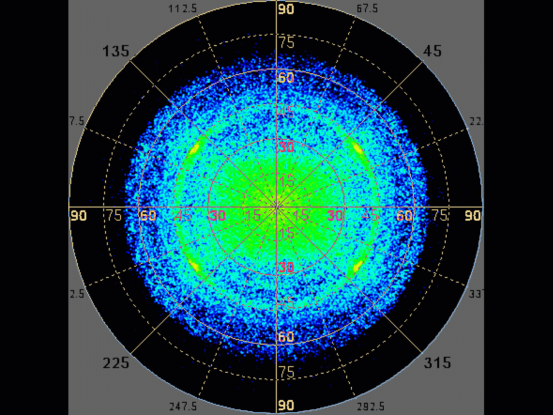
1.点击 Speos 仿真面板中的“Detecting all critical sun positions”仿真。仿真结果中包含一个“Detecting all critical sun positions.Intensity.lpf”文件,该结果是摄像头系统在将“图像传感器”设为朗伯光源时,由“强度”传感器捕获的强度分布。
2.双击“Detecting all critical sun positions.Intensity.lpf”结果,打开强度分布图,其中包含虚拟光度实验室中的光路信息。
3.该强度分布图回答了以下两个重要问题:
- 杂散光在哪些光源角度下会变得显著?
- 这些角度在强度上的关键程度如何?
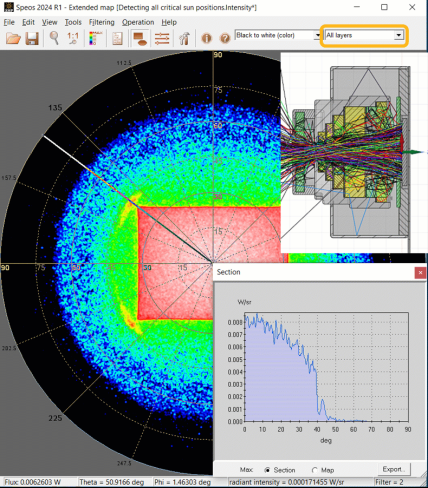
4.利用“Light Expert”功能,可以直观地了解强度图上某一指定区域内光线与系统几何体之间的交互情况。可以将该强度图划分为四个不同的区域。为便于理解,各测量区域采用不同颜色标识:
- 完整区域(绿色):覆盖摄像头前方整个物方空间
- 区域1(黄色):突出显示指定视场(橙色)内的光线
- 区域2(蓝色):位于对角线视场边缘
- 区域3(紫色):包含视场之外的光源角度
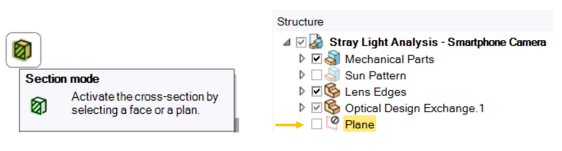
5.要观察摄像头系统的内部光线路径,可以点击3D视图左上角的“剖面模式”图标来激活剖面视图。然后,点击结构树视图中的“平面”即可。
6.要显示每个区域的光线,请点击Measures,并选择感兴趣的区域(相应行会高亮显示为蓝色)。此时,3D视图中的光线路径将随之更新。
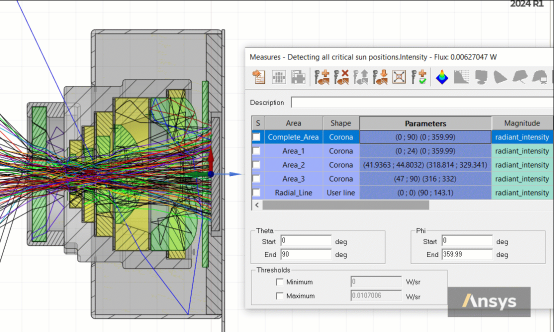
提示:右键点击“Detecting all critical sun positions.Intensity.lpf”文件,可以将光线路径以线几何体的形式导出。
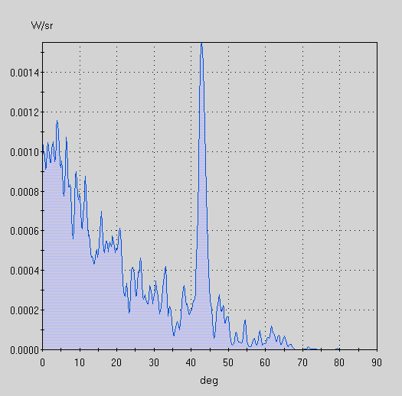
7.通过Radial_Line测量,可以显示沿传感器对角线方向从0°到90°所有光源角度的强度变化。点击“截面2D视图”图标即可查看。

8.在图底部选择“截面”(Section),使显示数值中的最大强度值对齐。
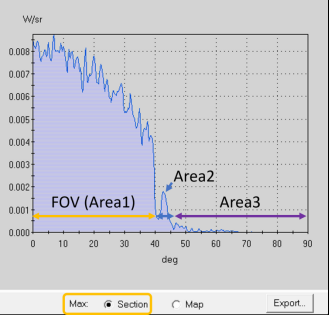
9.如图所示,随着光源角度的增大,强度值逐渐减小,进入光学系统的杂散光辐射也随之降低。当光源入射角大于视场角(40°)时,强度下降约一个数量级,随后在42°至44°之间出现一个小尖峰(区域2),之后直至90°(区域3)存在一些较低的辐射。该图包含了预期光学设计路径(信号)与杂散光路径(噪声)的强度信息。仿真结果中包含能量最强的25条光线路径序列(该数量可在传感器定义中设置)。可以利用虚拟照明控制器关闭信号(序列1)的贡献,仅显示杂散光序列。
10.打开虚拟照明控制器,取消勾选序列1(Sequence 1)。
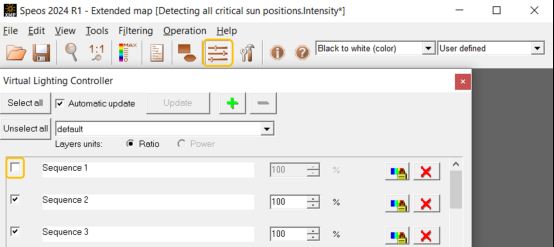
2D视图已更新,此时仅显示杂散光序列的贡献。
在本示例中,从所有杂散光序列中挑选出能量最强的四个序列,并分析其来源。
11.通过切换当前激活的“层”,逐步查看能量最强的五个序列,以更好理解其各自的贡献。其中“序列 1”代表预期的光学设计路径,其后的所有序列均被视为噪声。
可以得出以下结论:序列1、序列2和序列4对区域1有贡献,序列3对区域2有贡献,序列5对区域3有贡献。
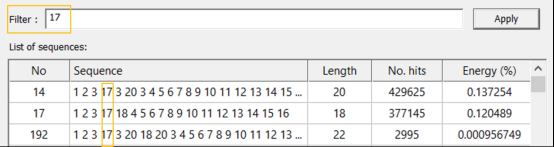
12.序列检测工具将提供有关每个序列的更详细信息,有助于理解每个序列与光线所击中元素之间的交互,以及这些元素被击中的顺序。序列列表提供了以下信息:交互次数(长度)、击中传感器的次数,以及占总积分能量的百分比。在本仿真中,光线从图像传感器(交互1)出发,穿过镜头系统,最终到达强度传感器。而在实际物理过程中,光传播方向相反,因此需要从右向左阅读这些序列。
13.前往“工具” -> “序列检测”,分析序列1至5的光线路径。在本项目中,序列1代表直接的光线路径交互:从光源对象(1)开始,依次经过镜片的前表面和后表面(1 2 3 4 5 6 7 8 9 10 11 12 13 14 15),最终到达传感器。
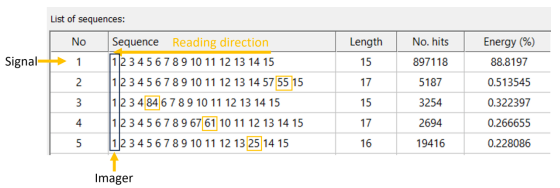
14.要识别出各序列所源自的关键面,可以比较不同序列的光学路径,找出从第二个及后续序列(能量最强的噪声序列)开始与第一个序列发生偏离的那个面,该面在列表中会以黄色高亮显示。
15.在交互列表中,点击“55”,即可在3D视图中高亮显示对应的几何面,并分析该光线路径的交互情况。对上述其他关键面重复此步骤。
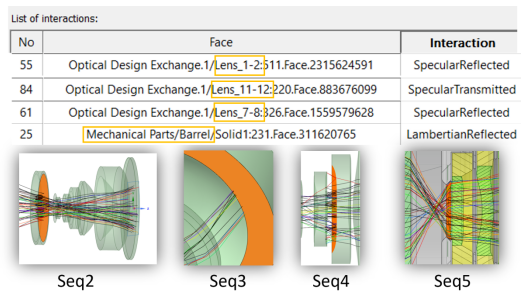
根据杂散光分析结果,基于能量最强的五个序列,可以识别出每个区域对应的关键面及其交互类型:
- 完整区域:由于镜筒与摄像头外壳之间存在微小气隙,暴露出一定的漏光现象。
- 区域1(视场内):在“Lens_1_1-2”的后表面和“Lens_7-8”的前表面发生镜面反射。
- 区域2(视场边缘):在“Lens_11_12”的前表面发生镜面透射。光线击中芯片区与机械直径之间的平坦表面。
- 区域3(视场外)·:在物理光阑处的内镜筒表面发生朗伯散射。
为降低杂散光水平,可以在发生镜面反射的镜片表面镀增透膜,并在光机结构件中最关键的面镀高吸收膜,以减少散射。为避免光线击中镜片11-12的平坦表面,可以修改隔圈的内径,以阻挡射向该区域的光线。杂散光抑制的具体措施将在第5步中实施。
在全面理解摄像头系统的杂散光行为并掌握杂散光分析的概念与技术之后,可以将其应用于分析视场内特定太阳光源角度(20°)下的摄像头系统。
第4步:分析特定太阳位置下的杂散光路径序列,识别引发散射的最关键表面
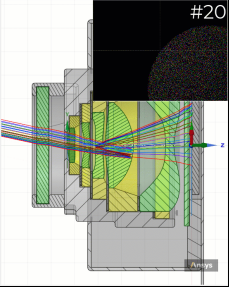
在第4步中,针对视场内20°太阳光源,仿真其在图像传感器上产生的杂散光,并再次利用Speos的LXP和“序列检测”功能,分析导致非预期杂散光的光线路径序列及物体交互。根据之前的分析可知,对于摄像头视场内的光源,光滑光学镜片表面的菲涅尔反射(导致镜头眩光或鬼像)是杂散光最主要的来源,这类问题可在OpticStudio中预先进行优化。接下来的分析将重点关注光线与系统中光机结构件发生光学交互而产生的杂散光(即散射)。本节将介绍一种高效的方法,用于识别对传感器噪声水平贡献显著、并对光学性能产生负面影响的最关键光机结构件表面。
1.点击 Speos 仿真面板中的“SLA 20deg sun positions LXP”仿真。该仿真包含一个“SLA 20deg sun position LXP.Imager Layer Seq.lpf”结果文件,即由“Imager Layer Seq”传感器捕获的照度分布,并按 100 个序列分别存储
2.双击“SLA 20deg sun position LXP.Imager Layer Seq.lpf”结果,在虚拟光度实验室中打开辐照度图。
3.该结果采用色度传感器进行仿真,包含针对整个传感器的一个测量区域。默认情况下,查看器的层分离设置为“全部层”,即未应用任何序列筛选,所有序列均会显示。切换当前激活的层,可以查看序列 1 至 20 的光线路径序列。各序列按到达传感器的能量大小排序。由于能量依次递减,查看较高序列时需要相应调整显示标度。提示:在 Light Expert 的定义面板中,可将 3D 视图中显示的光线数量增加至 500 条。
4.在前20个序列中,只有序列14和序列17包含了由光阑前镜筒表面引起的散射交互。
5.为了加快识别包含散射事件的其他序列,可以点击“工具”菜单中的“序列检测”。序列1代表直接的光线路径交互:从太阳光源对象(1)开始,依次穿过各镜片的前、后表面(2至16),最终到达传感器。在所有列出的序列中,“序列1”包含了传感器检测到的总能量的93.51%,其余能量(6.49%)可视为“图像污染”。序列中发生光线散射的一个标志是探测器被击中的次数较高。按“击中次数”对序列列表进行排序,可以更方便地识别出这些序列以及涉及散射交互的相关表面。
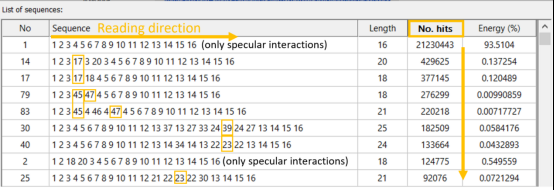
6.对于正向仿真,序列需要从左向右阅读。逐一查看序列中的各次交互,并提取发生散射事件的面。需要注意的是,一个序列可能包含多次散射交互(例如序列79和83)。如果按能量对该列表进行排序,就可以得出光机结构件中最关键表面的排名。另外注意,一个实体(此处为镜筒)可能包含多个面(名称末尾带有唯一的面ID标识)。
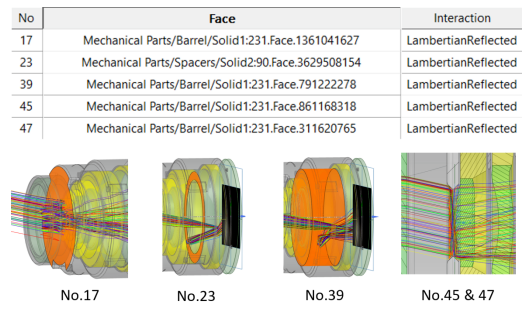
提示:若需查找包含与某个特定面交互的所有序列,可以使用筛选功能。下图中以对象17为例进行了说明。对于更高级的筛选功能,还可以使用正则表达式语法。
7.以下动画展示了至少包含一次表面散射事件的各序列,并按能量大小排序。
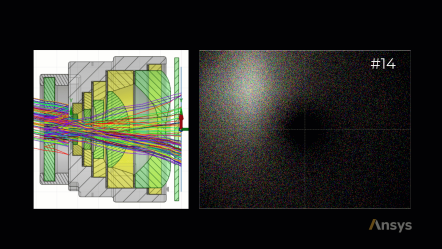
8.从这些结果可以得出结论:镜筒的内表面对传感器噪声水平有显著贡献。另一个了解特定几何体上被照射关键表面的有效方法,是在该几何体上应用 3D 辐照度传感器,并评估太阳辐照度负载。
9.在虚拟 3D 光度实验室中打开 “SLA 20deg sun position LXP.3D Irradiance.xm3” 结果文件。将层切换为 “Reflection (Radiometric)”,并将图例最大值设置为 2 W/m²。
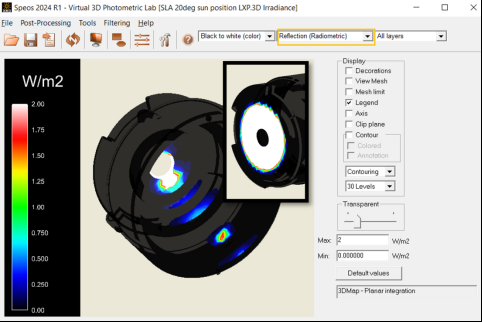
光阑周围区域以及内部的一些表面显示出较强的反射,这进一步印证了最关键的杂散光区域所在的位置。
完成系统分析后,便可与设计和结构团队讨论各光学组件对杂散光的贡献情况。
第5步:根据前序步骤中识别出的最关键表面,通过修改设计和材料来抑制系统中的杂散光。
为减少杂散光并提升图像质量,摄像头设计中会采用多种技术手段。虽然某些校正方法可在后期处理中完成,但在图像采集时就最大限度地抑制杂散光通常是最有效的途径。以下是几种常见的杂散光抑制技术:
- 增透膜(AR Coatings):在镜片表面镀多层增透膜,有助于减少反射、提高透光率,从而降低杂散光进入镜头的机会。
- 挡光结构设计(Baffle Design):在镜头或摄像头内部设计专门的挡光环和隔圈,可防止杂散光在内部来回反射并进入镜头。
- 光机结构件增透处理:与镜片镀膜类似,可在光机结构件和传感器表面镀增透材料,以减少内部反射并降低杂散光影响。
- 遮光罩设计(Lens Hood Design)·:阻挡外部杂散光进入镜头,对减少镜头眩光至关重要。
需要注意的是,虽然这些技术能显著减少杂散光,但完全消除并不总是可行的。结合使用上述多种方法可获得最优效果。
在本示例中,对第3b步确定的最关键镜片表面镀增透膜,以减小菲涅尔反射的影响。为降低视场边缘(区域2)的噪声尖峰,通过改变隔圈的内径,阻挡光线射向“lens 11_12”前表面通光孔径与机械直径之间的平坦区域。对第4步中识别出的最关键光机结构件表面,则镀高吸收膜(反射率 < 0.5%)。最后,对比优化前后全传感器视场上的信噪比、噪声水平,以及特定太阳位置下的杂散光情况。
1.启动 Ansys Zemax OpticStudio 2024 R1,打开位于“\ZOS\”文件夹中的“Lens @hyperfocal.zmx”项目文件。将文件另存为新名称“Lens @hyperfocal_with_AR_coatings”。
2.在以下五个镜片表面上,镀制理想的高性能增透膜,其反射率为 0.5%(格式:I.0.995,即透射率 0.995):
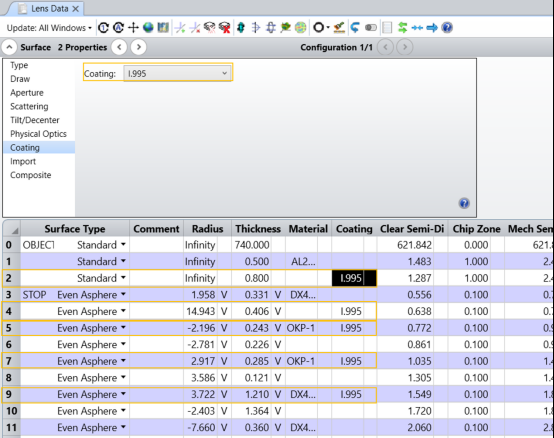
3.生成一个新的(\*.odx)文件,并按照第3a步中的描述将其作为第二个 ODX 组件导入 Speos(不要忘记检查网格设置)。
4.复制并粘贴仿真“Detecting all critical sun positions”,将其重命名为“Detecting all critical sun positions optimized”。对仿真“SLA 20deg sun position LXP”执行相同操作。
5.对于这两个仿真,将“Optical Design Exchange 1”组件替换为“Optical Design Exchange 2”(请仔细确认仿真中包含 17 个几何体)。
6.
7.接下来,需要修改隔圈的设计,以阻挡射向镜片平坦表面的光线。隐藏除隔圈“Solid2”和“Lens_11-12”之外的所有几何体。
8.为了阻挡射向镜片平坦区域的光线,需要修改隔圈的内径。请按照视频中的步骤进行操作。提示:按键盘上的空格键,然后输入尺寸(-0.04 mm)。
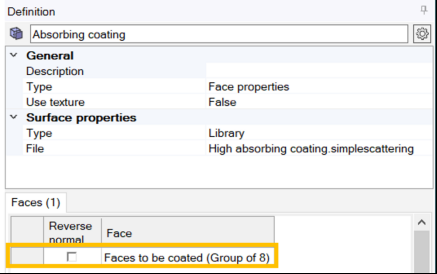
9.接下来,对第4步中识别出的最关键光机结构件表面,添加高吸收镀膜(反射率 < 0.5%)的面光学属性。这些表面已保存在名为“Faces to be coated”的“命名选择”组中。
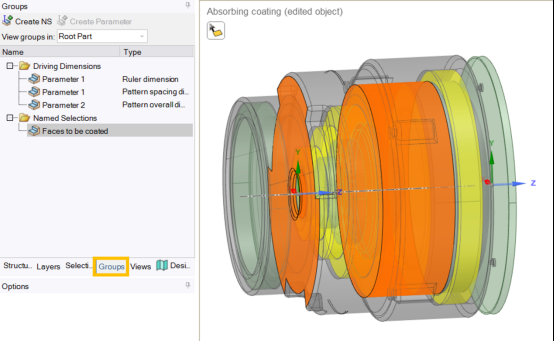
10.通过将这些面以命名选择组的形式添加到高吸收镀膜定义中,即可在这些表面上应用高吸收镀膜的面光学属性。使用面光学属性会覆盖这些面原本的“黑色阳极氧化”表面光学属性。
11.运行以下两个仿真:

12.对比未优化系统与优化系统在强度图上的噪声水平。
杂散光信噪比是光学及成像系统中用于衡量有效信号相对于非预期杂散光质量的一项指标。
杂散光信噪比的计算公式通常表示为:
1.根据序列检测查看器中提供的能量信息,计算在 20° 太阳位置下,未优化系统与优化系统的信噪比值。

2.根据以下公式计算信噪比:
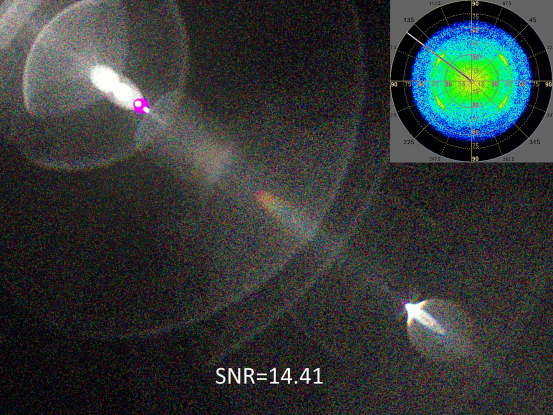
3.对于未优化的光学系统,计算得到的信噪比为 14.41。优化后,信噪比提升至 33.79,表明探测器上的杂散光降低了 55.7%。
综上所述,使用 Ansys Optics 进行手机摄像头系统杂散光分析的流程包含以下几个步骤:
首先进行镜头系统的光学设计与优化,过程中需考虑主光路的成像性能指标,如调制传递函数(MTF)和点扩散函数(PSF)。鬼像优化旨在减少菲涅尔反射的影响。随后进行系统级杂散光分析,包括将光学系统从 Zemax 转移至 Speos,并将光机结构件纳入考量。关键光源位置的检测用于评估视场内外的潜在漏光情况。
流程的最后阶段,分析能量最强的杂散光路径序列,识别关键物体,并通过设计修改来抑制系统中的杂散光。
进一步拓展模型(高级杂散光技术):
- 全视场杂散光可视化(光源位置 0°–42°)
- 结合 Ansys Zemax OpticStudio、Speos 与 optiSLang 实现光学设计交换的自动化
- 仿真摄像头图像传感器上的杂散光,并分析多个传感器在不同光源位置下的光线路径(本文未涵盖,更多信息请参见其余文章)
全视场杂散光可视化(光源位置 0°–42°)
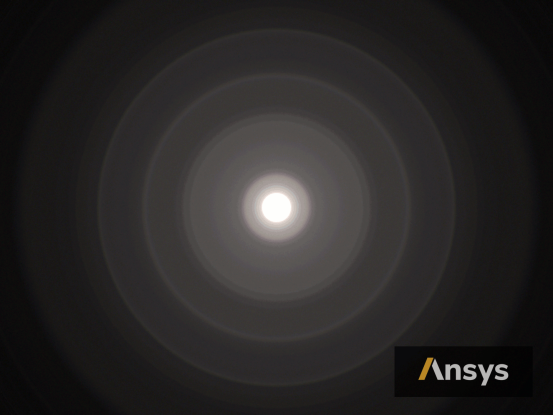
当使用摄像头系统直接观察强光源(此处为太阳)时,会看到一个明亮的斑点(图示为紫色斑点)以及多种鬼像。这些鬼像由镜片之间以及镜片与光机结构件之间的反射和光线交互产生,会导致光学性能下降。
项目中包含一个基于面光源的参数化太阳光源模型。可在“组”(Groups)面板中修改其在 XY 平面内的旋转参数、视场角及步长。
提示:只需在 3D 视图中直接选中光源,即可轻松将其添加到仿真中。
为了说明全视场覆盖下详细测试的重要性,本文以 2° 为视场角步长,对 0° 至 42° 范围内的太阳位置进行了杂散光仿真。某些杂散光图案和鬼像仅出现在特定的太阳角度下。在本系统中,镜片色散效应在 19° 至 25° 之间变得明显。借助按“光源”区分的传感器层分离功能以及 Speos HPC 的高性能与可扩展性,所有太阳位置的仿真可以同时进行。
重要模型设置
基本信息 - 摄像头设计规格
- 基于5片非球面镜片
- 模压成型镜片,材料为光学树脂(DX4900 与 Okp-1)
- 传感器与镜头系统之间的红外截止窗(Bk7)
- 摄像头外部的机械保护窗(蓝宝石玻璃)
- 最佳视场角:80°(全视场对应传感器对角线)
- 有效焦距:2mm
- 光圈:F#1.8
- 镜头深度(从第一片镜片到传感器):5.3mm
网格划分
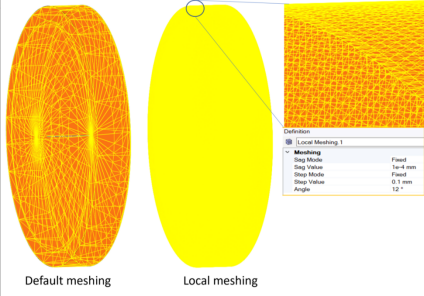
网格设置对获得正确的仿真结果至关重要,它决定了被仿真几何体的质量。精细网格能带来更准确的结果,但也会增加仿真时间。粗糙网格可能导致结果质量下降,尤其对精密光学元件而言。本项目中的网格设置为与实体尺寸成比例,并对所有光学元件应用了精细的局部网格。有关网格设置的更多详细信息,请参见“网格属性”文档。
材料
要确定光线在 Speos 中如何与几何体相互作用,需要定义仿真中所包含对象的光学属性。
在 Speos 中(实际物理世界也是如此),存在两种类型的光学属性:表面/面光学属性(如光学抛光、粗糙、镀膜等)以及体积光学属性(如空气、玻璃等)。
本项目所使用的材料如下表所列:
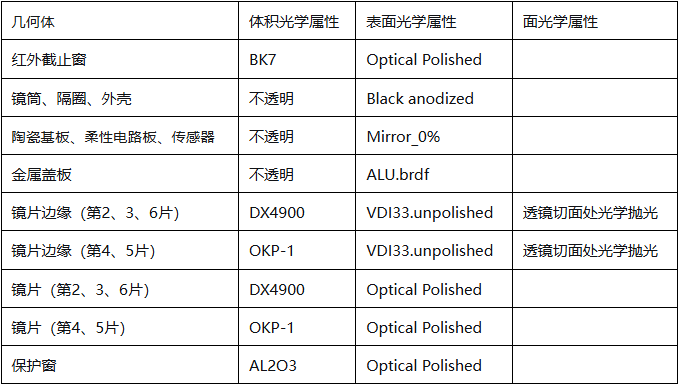
定义光学属性文件有多种方式可选,包括:通过光学属性编辑器进行用户自定义、用户可编程的表面属性插件,以及光学库。光学库包含由 Ansys 测量或定义的一组表面属性和材料属性,可通过 Ansys 网站上的附加组件包进行下载。
太阳光源
对于地球上的观测者而言,太阳的视直径约为 0.5 度。
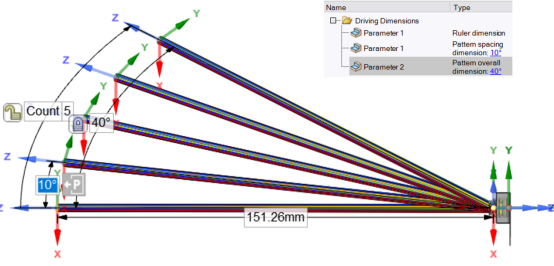
在本项目中,太阳光源被设置为圆形面光源,其距离(D)为 151.26 mm,直径(d)为 2.64 mm,由此得到的角直径(δ)为 0.5 度。

太阳光源具有朗伯强度分布,其总角度(α)为 0.5°,产生的光束直径(a)为 1.32 mm,足以覆盖整个入瞳。
光源光谱可从光学库中选择,或使用黑体辐射模型,以开尔文为单位设置光源光谱的色温。本示例中,采用黑体模型,色温设为 5780 K。
光源的光通量设置为 0.44 lm,这可在图像传感器平面上产生 100,000 lx 的平均照度值。
面光源从 0° 到 15° 按 5° 步长进行排布。该排布采用参数化方式,便于后续修改以增加更多太阳位置或其他入射角度。